




Робот – это механическое (обычно электронно-электромеханическое) устройство, созданное по принципу подобия или, зачастую, на основе образа живого организма. В частности, для получения информации о внешнем мире робот снабжен датчиками (аналогами сенсорных рецепторов живого организма), а движения осуществляются при помощи манипуляторов, замещающих двигательную систему и скелетные мышцы. В качестве управляющего звена (аналога мозга) у робота выступает программа и микропроцессоры. Назначение робота – максимально возможное замещение человека в его производственной и исследовательской деятельности. Более того, робототехника призвана «достроить» человека и наделить его прежде невозможными способностями. Ранее, новые возможности человеку дарили механические устройства на мускульной тяге, например, велосипед, затем – на тяге топлива (автомобиль, ракета). Далее появился компьютер и вместе с ним – проблема взаимодействия в системе «человек – компьютер». С относительно недавних пор появилась проблема «интерфейс мозг-компьютер» (BCI, brain-computer interface), который необходим для мысленного управления внешними устройствами по принципу «без рук». Эти «продолжения» человека дают новые возможности в реабилитации больных, протезировании (возмещении) утраченных функций, управлении производственными процессами, перемещении в пространстве. Но есть еще одна парадигма, которая уже проявляет себя сейчас, но проявит себя еще больше в недалеком будущем – взаимодействие «человек-робот» (HRI, human robotic interaction), также известная как создание «команды робот – человек» (robotic-human teaming) (Talamadupula, 2010). Эта парадигма заключается в том, что человек и робот получают общую цель и должны достичь взаимодействия для ее достижения.
Данная парадигма возникла для спасения человека в экстремальных условиях, а также как альтернатива пилотируемым межпланетным космическим полетам. Робот должен общаться с человеком, выполнять его команды и самостоятельно строить план выполнения команды. В определенном смысле, робот может стать видом сервиса (Chen, 2012). Далеко не все проблемы, которые возникают при практическом планировании таких космических полетов, могут быть решены в настоящее время. Даже при преодолении таких неблагоприятных влияний невесомости (микрогравитации) при полете, например, на Марс или Луну и обратно, как атрофия мышц и разрушение костей, или решение вопросов психологической устойчивости в межпланетном полете, остается вопрос радиации (космического излучения), который на данный момент не решен. Могут возникнуть проблемы и с посадкой или стартом с другой планеты. Пилотируемый межпланетный космический полет с точки зрения глобальной миссии человека очень привлекателен, но в то же время очень уязвим. В этой связи возникает вопрос о том, чтобы все или часть функций по освоению космического пространства взял на себя робот. Подобные роботы, которые, по сути, представляют собой заместителя человека, уже используются на Марсе (марсоходы), а ранее – на Луне (луноходы). Соответственно, было бы удобно использовать робота, который бы тесно был связан с человеком-оператором (Fong, 2013). Работ по теории и практике робототехники много, и их число растет. Наиболее очевидной проблемой в области робототехники является построение руки-манипулятора, которая бы полностью замещала человека на расстоянии. Можно было бы ограничиться и более простой задачей – роботизировать утраченную функцию для более близких двигательных задач, то есть, по сути, использовать робототехнику для протезирования функции.
Одним из наиболее исследуемых подходов к роботизации утраченной функции является использование естественного биосигнала, который стал бы источником управления. Наиболее очевидным кандидатом на роль такого сигнала является поверхностная интерференционная электромиограмма (иЭМГ) скелетных мышц, также известная как миоэлектрический сигнал (Parker, 2006; Scheme, 2011). Существует метод функциональной электростимуляции мышц (FES, functional electrical stimulation), при котором на сохранившиеся мышцы парализованной руки подается электрический стимул в заданной временнόй и пространственной последовательности, что позволяет получить функционально осмысленное сокращение мышц (Douceta, 2012). Однако часто происходит полная утрата (ампутация) конечности, что требует ее протезирования или роботизации. Среди методов протезирования на основе роботизации руки наиболее прямолинейным подходом является запись ЭМГ непосредственно с оставшихся мышц культи для последующей количественной оценки и использования в качестве управляющего сигнала (Scheme, 2011). Актуальной задачей современной реабилитологии и неврологии является создание биоуправляемого протеза на основе интерфейса «скелетная мышца – протезное устройство». Смысл интерфейса сводится к соединению определенной скелетной мышцы предплечья (руки) и приводов, отвечающих за похожую функцию кисти руки при помощи электромиографического сигнала («киборгизация»). Таким образом, паттерн электрической мышечной активности предплечья будет транслироваться в паттерн механических движений искусственной кисти.
иЭМГ возникает как результат интерференции потенциалов действия многих двигательных единиц (ДЕ) и визуально представляет собой внешне хаотическую интерференционную кривую. Поверхностная иЭМГ очень напоминает метод электрокардиографии и представляет собой непрерывное измерение разности потенциалов под электродами непосредственно над брюшком мышцы. Метод ЭМГ, особенно накожной, кажется простым в исполнении и интерпретации, однако один из ведущих специалистов по ЭМГ К. де Люка заметил, что: “EMG is a seductive muse ... it is too easy to use and consequently too easy to abuse” («ЭМГ − муза-искусительница ... так просто пользоваться и так легко злоупотребить») (deLuсa, 1997). На поверхностную ЭМГ влияет множество физических и физиологических факторов: толщина подкожной жировой клетчатки, состояние и подготовка кожи, длина и состояние скелетно-мышечных волокон, утечки тока из соседних мышц, близость костных массивов, положение и размер электродов (deLuсa, 1997). Метод поверхностной ЭМГ обладает хорошими потребительскими качествами: низкая стоимость и большая пропускная способность сеансов электромиографии, неинвазивность, безопасность. Часто иЭМГ используется для регистрации самого факта активности мышцы, для косвенной оценки силы до и после лечения, оценки эффекта тренировки. Для оценки иЭМГ используются такие параметры как средняя амплитуда, частота спектра, количество перегибов на кривой.
Одним из наиболее необычных подходов является метод целенаправленной реиннервации мышц (TMR, targeted muscle reinnervation), суть которой сводится к тому, что нервы от более несуществующих мышц конечности (вследствие травматической ампутации) хирургически перенаправляются к оставшимся мышцам, которые становятся «бесполезными» после потери конечности (Souza, 2014). Например, при плечевой дизартикуляции (удалении всего плечевого сустава и руки ниже него) мышцы, управляющие этим суставом, такие как головки большой грудной мышцы, могут быть хирургически реиннервированы нервами, которые обычно управляют мышцами руки. В таком случае, при мысли о движении руки будут напрягаться мышцы плечевого пояса, а от их иЭМГ, в свою очередь, будут управляться протезы.
Неудивительно, что существует много работ по многоканальной записи пространственно-временной активации мышц предплечья при различных движениях кисти, так как исследование движений руки представляет самостоятельный интерес. Распознавание образа (паттерна) движения, особенно в устройствах, которые способны обучаться, очень перспективно. В настоящее время такие устройства способны обучиться распознавать движение по иЭМГ примерно за 40 минут, что и хорошо, и неудовлетворительно, так как все же утомительно для пациента (Liu, 2014). Мы считаем, что сигнал о пространственно-временно активации целой группы мышц был бы удобен пациенту. Поэтому наш подход заключается в том, чтобы при наличии здоровой руки создать базу данных (библиотеку) ЭМГ-паттернов различных движений, которые затем можно перенаправить на протез или робот отсутствующей (полностью или частично) руки. Паттерн движений очень индивидуален и может исполняться разными конечностями очень похожим образом. Например, подпись, которую человек обычно делает при помощи правой руки, можно сделать и при помощи всей руки – изменится размер подписи, но не ее паттерн. Паттерн останется узнаваемым, хотя человек ни разу не делал подпись «не кистью». В определенном смысле это будет напоминать аутогемотрансфузию, когда во время хирургической операции пациенту переливают запасенную заранее кровь пациента (Трекова, 2014).
Мы предлагаем делать запись паттерна ЭМГ движений кисти с максимально возможным количеством каналов (n=8-16) для максимального количества ясно различающихся и полезных в повседневной практике движений кисти или пальцев кисти.
В качестве подготовительного этапа нами проведены пилотные записи 6 наиболее распространенных движений кисти, которые визуально четко различаются по ЭМГ, то есть могут считаться образцами (паттернами) данного движения. Примеры приведены на Рисунках 1 и 2. В дальнейшем мы предполагаем использовать данные паттерны в качестве аутосигнала для протезирования функции верхней конечности. Для записи был использован электромиограф Нейро-МВП-8 (ООО «Нейрософт», г. Иваново, Россия) и самоклеящиеся одноразовые Ag-AgCl электроды Blue Sensor («Olstykke», Дания). Места установки электродов были подобраны по принципу наибольшей амплитуды ЭМГ при произвольной активации данной мышцы.
В последующем, на первом этапе собственно построения прототипа протеза, мы предполагаем транслировать данные образцы многоканальной записи ЭМГ (и, соответственно, образцы управляющего сигнала) в аналогичный электростимулирующий сигнал, который может вызывать стимулированное движение, более или менее подобное оригинальному движению при естественной активации. После этого, на втором этапе, предполагается применить полученные управляющие сигналы к механическому устройству, которое могло бы повторить некоторые движения кисти. Одновременно, представляется интересным создать компьютерную модель управления движениями кисти на основе полученных ЭМГ-сигналов реальных движений.
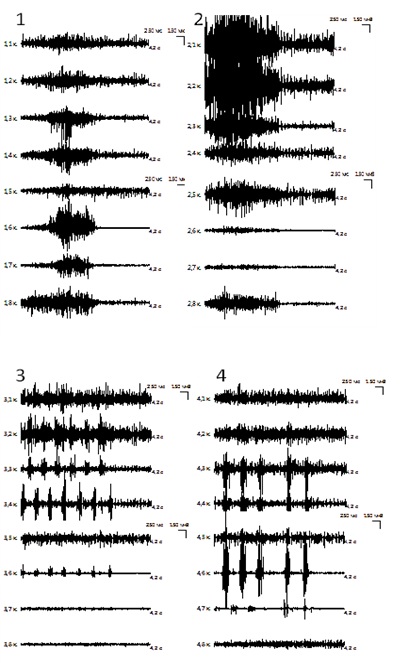
Рисунок 1. ЭМГ-паттерны сгибания кисти (сжимание в кулак, 1), разгибания кисти (2), сгибания-разгибания указательного (3) и безымянного пальцев (4).
Номера каналов ЭМГ: 1 – поверхностный сгибатель пальцев, 2 – поверхностный разгибатель пальцев, 3 – разгибатель указательного пальца, 4 – длинный разгибатель большого пальца, 5 – короткая мышца, приводящая большой палец, 6 – поверхностный сгибатель пальцев, 7 – длинный сгибатель большого пальца, 8 – мышца, приводящая мизинец.
Figure 1. EMG-patterns of the hand flexion (clenching a fist, 1), hand extension (2), flexion-extension of the forefinger (3) and the annular finger (4).
Numbers of EMG-channels: 1 – flexor digitorum superficialis muscle, 2 – extensor digitorum muscle, 3 – extensor indicis muscle, 4 – extensor pollicis longus muscle, 5 – abductor pollicis brevis muscle, 6 – flexor digitorum superficialis muscle, 7 – extensor pollicis longus muscle, 8 – opponens digiti minimi muscle.
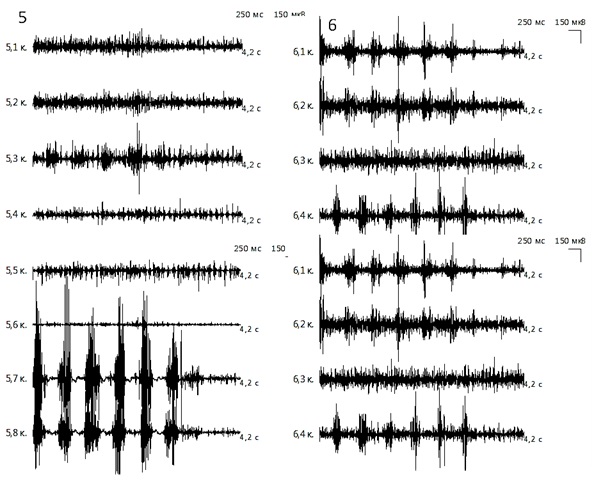
Рисунок 2. ЭМГ-паттерны сгибания-разгибания среднего пальца (5) и оппозиция указательного и большого пальцев (6) правой руки.
Обозначения те же, что и на Рисунке 1.
Figure 2. EMG-patterns of the middle finger flexion-extension (5) and opposition of the thumb to the forefinger (6) on the right hand. The numerical designations are the same as on Figure 1 (see figure legend).
Благодарности
Работа выполнена в рамках Программы стратегического развития ПетрГУ на 2012-2016 гг.
Библиография
1. Chen X,Xie J, Ji J, Sui Z. Toward Open Knowledge Enabling for Human-Robot Interaction. Journal of Human-Robot Interaction 2012, 1:100-117.
2. De Luca C. The use of surface electromyography in biomechanics. J Appl Biomechanics 1997, 13:135.
3. Douceta BM, Lamb A, Griffinb L. Neuromuscular Electrical Stimulation for Skeletal Muscle Function. Yale Journal of Biology and Medicine 2012, 85:201-215.
4. Fong T, Zumbado JR, Currie N, Mishkin A, Akin DL. Space Telerobotics: Unique Challenges to Human–Robot Collaboration in Space. Reviews of Human Factors and Ergonomics 2013, 9:6.
5. Fougner A, Scheme E, Chan AD, Englehart K, Stavdahl O. Resolving the limb position effect in myoelectric pattern recognition. IEEE Trans Neural Syst Rehabil Eng 2011, 19:644-651.
6. Liu J, Zhang D, Sheng X, Zhu X. Quantification and solutions of arm movements effect on sEMG pattern recognition. Biomedical Signal Processing and Control 2014, 13:189-197.
7. Parker P, Englehart K, Hudgins B. Myoelectric signal processing for control of powered limb prostheses. J Electromyogr Kinesiol 2006, 16:541-548.
8. Souza JM, Cheesborough JE, Ko JH, Cho MS, Kuiken TA, Dumanian GA. Targeted muscle reinnervation: a novel approach to postamputation neuroma pain. Clin Orthop Relat Res 2014, 472:2984-2990.
9. Scheme E, Englehart K. Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use. J Rehabil Res Dev 2011, 48:643-659.
10. Talamadupula K, Benton J, Kambhampati S, Schermerhorn P, Scheutz M. Planning for human-robot teaming in open worlds. ACM Transactions on Intelligent Systems and Technology (TIST) 2010, 1:14.
11. Young AJ, Hargrove LJ, Kuiken TA. Improving myoelectric pattern recognition robustness to electrode shift by changing interelectrode distance and electrode configuration. IEEE Trans Biomed Eng 2012, 59:645-652.
12. Трекова Н.А., Соловова Л.Е., Гуськов Д.А., Соловьева И.Н., Маркин А.В., Голобородько В.Г., Панин В.В. Трансфузионная тактика при операциях на сердце и аорте // Анестезиология и реаниматология. – 2014. – №3. – С. 4–10.